|
 |
|
One difficult problem specifically related to optical motion capture for
skeleton-driven character animation is the non-trivial
mapping of the markers moving in Cartesian 3D-space
to a relative motion representation which is often defined by joint angles plus a body center
or root.
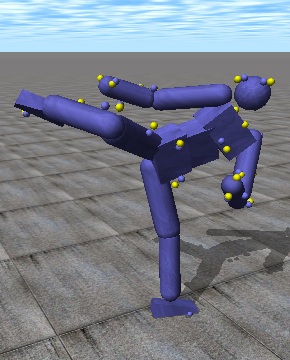
To accomplish the mapping, we attach virtual springs to marker
positions located on the appropriate landmarks of a physical
simulation and apply resistive torques to the skeleton's joints
using a simple controller. Details can be found in the paper.
FIGHTING: This example shows an array of kicks,
punches and elbow strikes as well as some upper-body blocking defenses.
Motions include
highly irregular,
fast-paced motion and quick and subtle footwork and through the examples
our system finds postures with believable joint angles for a large range
of potential marker positions.
WALKING: A second, walking
example
includes foot constraining forces and shows crisp footplants that are aligned with the
original data. Using a foot constraint, the system automatically identifies when the
foot is planted or not, re-orients the foot to avoid penetration with the ground plane,
and applies friction forces to resist motion as appropriate.
|
