
Control of Rotational Dynamics for Ground Behaviors
|
Control of Rotational Dynamics for Ground Behaviors |
Abstract |
|||
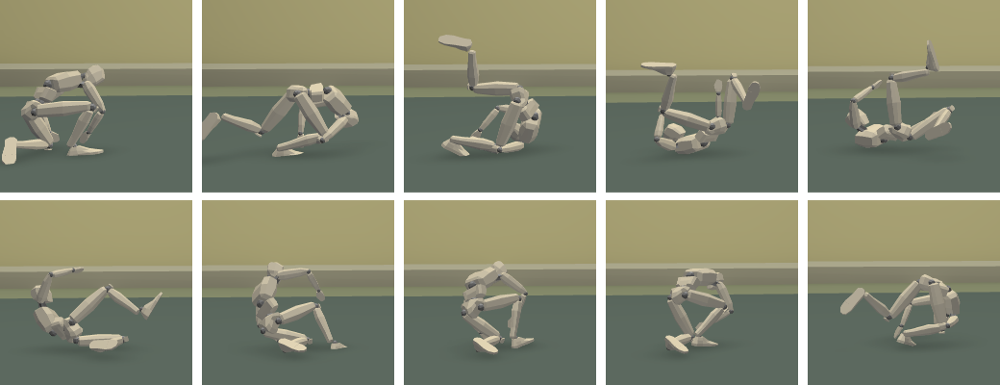
| This paper proposes a physics-based framework to generate rolling behaviors with significant rotational components. The proposed technique is a general approach for guiding coordinated action that can be layered over existing control architectures through the purposeful regulation of specific whole-body features. Namely, we apply control for rotation through the specification and execution of specific desired ‘rotation indices’ for whole-body orientation, angular velocity and angular momentum control. We account for the stylistic components of behaviors through reference posture control. The novelty of the described work includes control over behaviors with considerable rotational components as well as a number of characteristics useful for general control, such as flexible posture tracking and contact control planning. |
 |
||
 |
|||
|
Control of Rotational Dynamics for Ground Behaviors
Brown, D., Macchietto, A., Yin, K., Zordan, V., Control of Rotational Dynamics for Ground Behaviors, ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2013. (BEST PAPER) |
|||