
Goal-Directed Stepping with Momentum Control
|
Goal-Directed Stepping with Momentum Control |
Abstract |
|||
| This paper proposes a technique for animating simulated characters to perform controlled steps. The desired step is controlled by high-level goals, namely step position and step duration. These stepping goals guide the desired time-varying values for the center of mass and the stepping foot which in turn lead to objectives dictating the desired changes in momentum and joint angles over the duration of the step. Our approach employs a multiobjective optimization to solve for joint accelerations from the objectives and uses inverse dynamics to compute joint torques. Our approach can guide a character with purposeful, directable steps for controlling careful navigation of the character’s position and orientation. In addition, the same system can be used to create protective steps to prevent falling as a reaction to a disturbance. A novel supervisory routine automatically chooses when and where to step based on an analysis of the momentum conditions for the character. We contrast this approach to previous methods for step recovery using the inverted pendulum. |  |
||
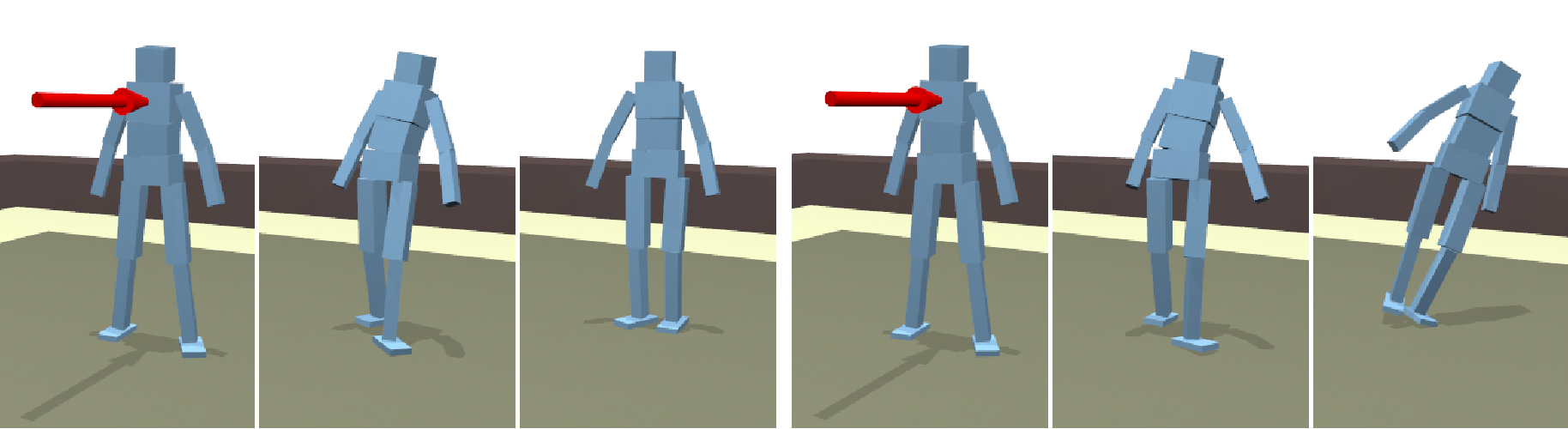 Comparison between our momentum supervisor (left) and inverted pendulum prediction (right). |
|||
|
Goal-Directed Stepping with Momentum Control
Wu, C.-C., Zordan, V.B., ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA) 2010.  Movie (avi, 30.2M) Movie (avi, 30.2M)
|
|||